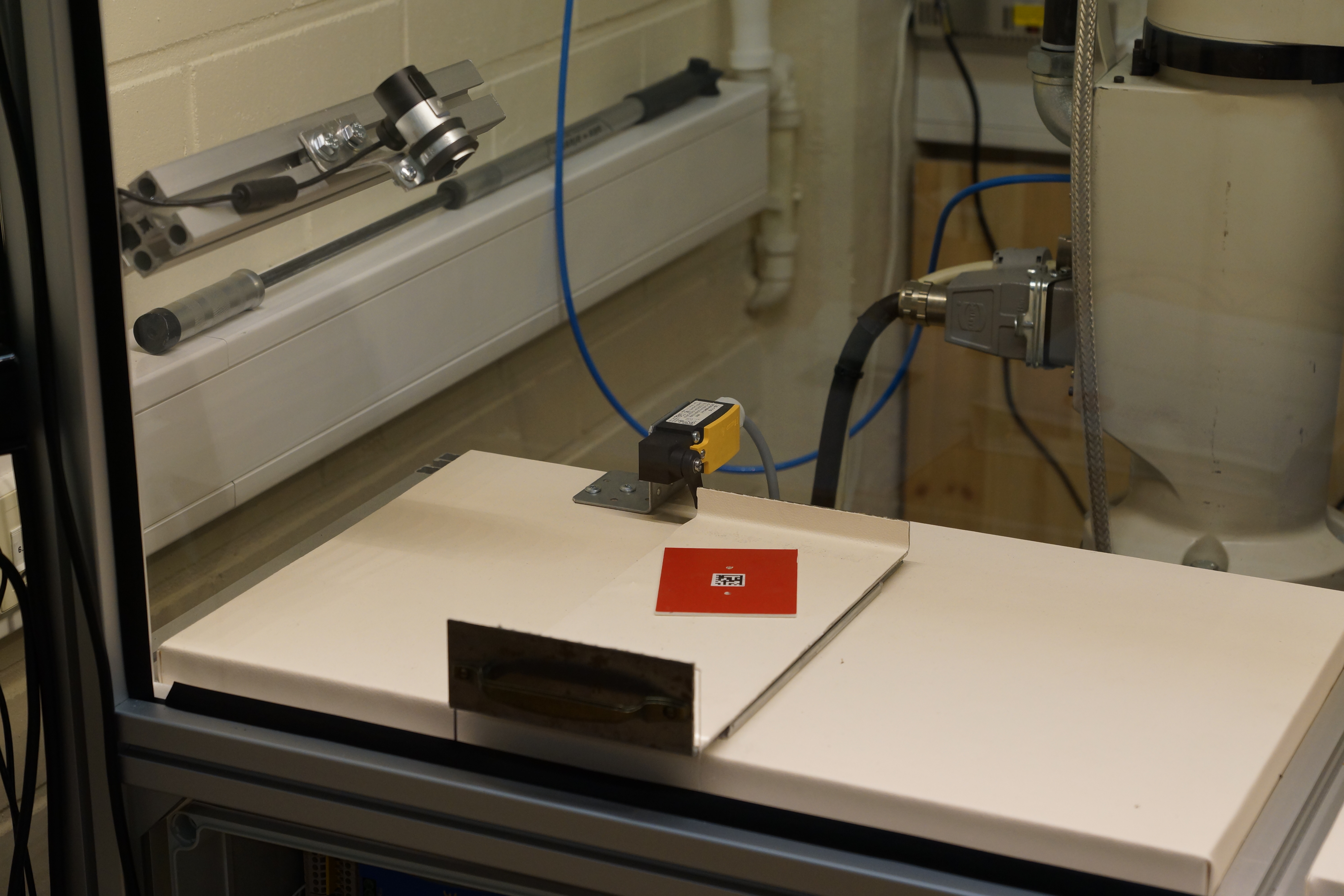
Konenäön ja robotin yhteistoimintaa esittelevässä demonstraatiossa tarkastetaan muovisten taustalevyjen kokoa, reikien kokoa ja paikkaa, väriä sekä matriisikoodin sisältöä. Muovisia taustalevyjä on viittä eri väriä ja kahta eri kokoa. Taustalevyt ovat joko isoja tai pieniä, mutta niiden leikkaamisessa on voinut tapahtua virheitä ja näitä kokovirheitä halutaan tunnistaa järjestelmällä. Levyissä pitäisi olla 4 mm:n reiät määrätyillä paikoilla, mutta reikien koot ja paikat saattavat vaihdella, joten niitäkin virheitä halutaan tarkastella. Matriisikoodi sisältää tiedon kappaleen koosta ja väristä. Tätä tietoa halutaan hyödyntää myöhemmin pakkausvaiheessa, joten matriisikoodin sisältö luetaan ja luettua tietoa verrataan kameroilla nähtyyn kappaleeseen.
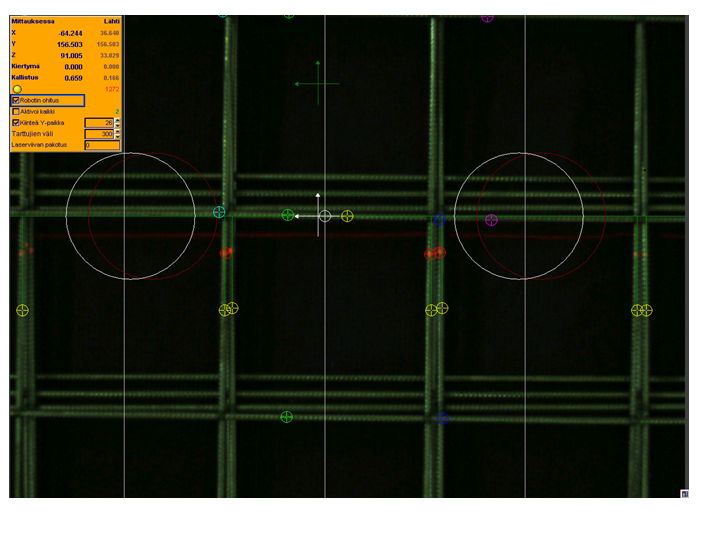
Järjestelmä koostuu kahdesta kamerasta. Ensimmäinen kamera lukee matriisikoodin, tarkastaa kappaleen värin sekä antaa robotille koordinaattitiedot, jotta robotti voi hakea levyn ja viedä sen toiselle kameralle tarkasteluun. Toinen kamera mittaa levyn ja reikien koot sekä tarkastaa reikien paikat. Tämän jälkeen se antaa robotille tiedon siitä, minne kappale viedään tarkastuksen jälkeen. Mahdollisia päätepisteitä ovat “Hylätyt”, “Reikien suurennus”, “Levyn pienennys”, “Iso kappale” ja “Pieni kappale”. Näistä kaksi viimeistä ovat siis hyväksyttyjä, toinen ja kolmas ovat muokattavaksi meneviä ja ensimmäiseen laatikkoon menevät hylätyt tuotteet, joita ei enää voi muokata.
Demonstraatio on hyvä esimerkki kahden erittäin halvan kameran yhteistyöstä robotin ohjauksessa. Demonstraatioon pääsee tutustumaan seuraavan videon avulla.