3D-kuvausta voidaan toteuttaa usein eri keinoin:
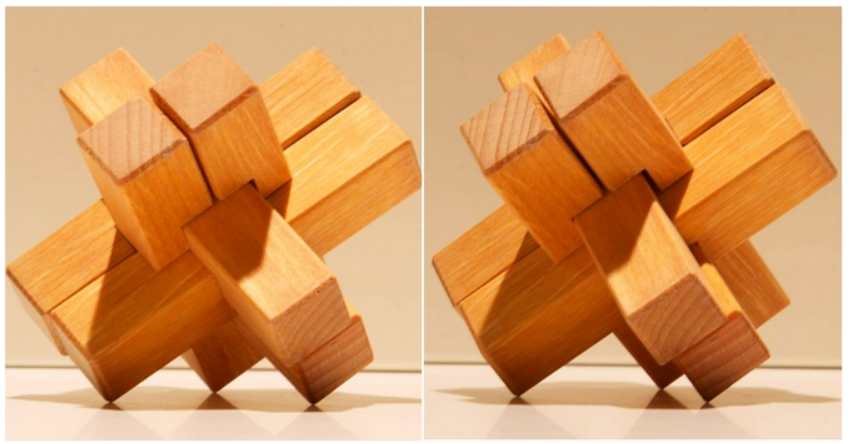
Stereokuvaus
Stereokuvauksen toimintaperiaate on ihmisen näkökyvyn kaltainen. Stereokuvauksessa kamerat järjestetään niin, että kuvia otetaan vähintään kahdesta eri suunnasta kohteen liikkumatta. Toinen vaihtoehto on ottaa kohteesta yhdellä kameralla useita kuvia eri kulmista. Tällöin tietysti kameraa tulee liikuttaa tarkasti tunnettuihin pisteisiin. Kuvien yhdistäminen tehdään tietokoneella, joka analysoi kuvat kokonaisuuksina etsien hahmoista samoja pisteitä ja yhdistämällä niitä. Näin saadaan aikaan kohteen 3D-kuva. Stereokuvauksessa kohteen hahmon tulee olla sellainen, että tietokone ymmärtää sen. Vaikeita kohteita ovat esimerkiksi erilaiset tasaiset pinnat sekä pinnat, joissa on toistuvia muotoja.
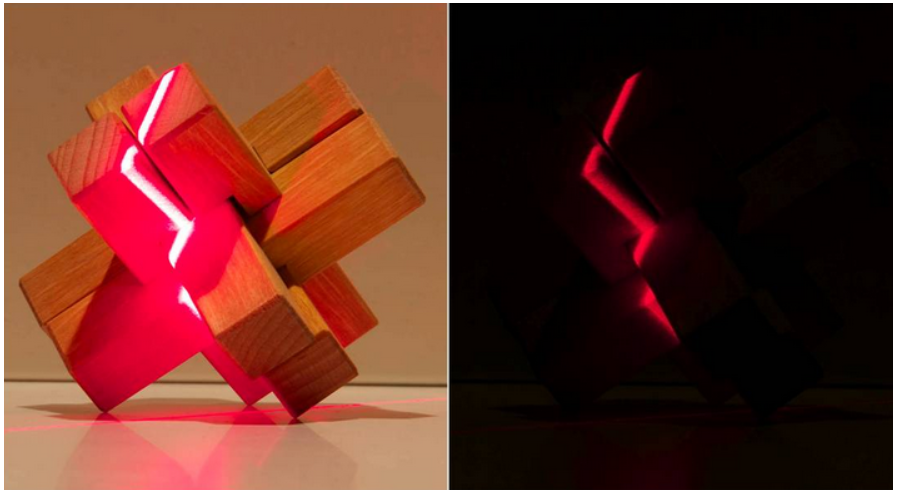
Rakenteelliseen valaisuun perustuva 3D-kuvaus
Rakenteellisen valaisuun perustuvassa 3D-kuvauksessa kohdetta valaistaan osittain valolla, jonka geometria tunnetaan ja sitä kautta saadaan selville kohteen paikka. Yleisin valaisutekniikka on laser. Laserilla saadaan tuotettua erittäin tarkkoja valokuvioita. Yleisimmin käytetään laserviivavaloa, jota liikutellaan kappaleen pinnalla ja samaan aikaan kuvataan viivan profiilin muutokset, joista saadaan ohjelmistolla muodostettua 3D-malli. Kuvauksen aikana kappaleen tulee joko liikkua tunnetulla tavalla tai se ei saa liikkua, jos laseria liikutetaan. Tällä tekniikalla kappaleita voidaan kuvata hyvinkin tarkasti. Kappaleen pinnan kiiltävyys, karheus jne. vaikuttavat kuvauksen onnistumiseen oleellisesti.
Fringe
Fringen toiminta perustuu siihen, että kohde valaistaan tunnetulla valaisukuviolla eli fringe-kuviolla. Kuvio muodostuu esim. pystysuorista mustista ja valkoisista viivoista, jotka lähetetään projektorille. Projektori projisoi fringe-kuvion kohteen pinnalle. Kohteen pinnanmuodot muuttavat projektion muotoa kameran näkymässä, kun pystysuorat viivat taittuvat kohteen muotojen mukaisesti. Kamera kuvaa vääristyneen fringe-kuvion ja lähettää sen tietokoneelle analysoitavaksi. Tietokone analysoi kuvan käyttäen vastinpisteisiin perustuvaa kolmiomittausta. Näin saadaan aikaan kohteen 3D-malli. Fringe-menetelmällä aikaan saadun 3D-mallin tarkkuuteen vaikuttaa kameran ja optiikan lisäksi myös projektorin tuottaman viivaprojektion tarkkuus.
Kinect
Microsoft Kinectin 3D-kuvausjärjestelmän infrapunavalonlähde valaisee ympäristöä yli kymmenellä tuhannella infrapunapisteellä. Näiden pisteiden avulla Kinectin infrapunakamera tunnistaa hahmon tai kappaleen sijainnin sekä etäisyyden. Kinectissä on kaksi kameraa, normaali näkyvän valon aallonpituusalueen kamera pelitilanteiden kuvaamiseen sekä infrapunakamera liikkeiden ja sijainnin tunnistamisteen. Kinectistä on tullut versio myös Windows-tietokoneille, ja Microsoft on antanut sen kehitystyökalut kehittäjien käyttöön. Viime aikoina eri valmistajilta on tullut Kinectin teknologiaan perustuvia laitteita myös teollisuuskäyttöön.

Time of Flight
Time of Flight -kuvaustekniikassa on sama toimintaperiaate kuin ultraääniantureissa. Periaatteessa järjestelmä sytyttää valaisimen, jonka jälkeen se laskee ajan, joka kesti valonsäteiltä kulkea kohteelle ja palata takaisin kohteelta kameralle. Time of Flight toimii joko vaihe-eron havaitsemisella tai elektronisella sulkijalla, joka pulssittaa valonlähteen mukaan. Time of Flight on todella nopea kuvaustapa ja sillä voidaan kuvata nopeastikkin liikkuvia kohteita kolmiulotteisesti. Tekniikka on kuitenkin vielä suhteellisen uutta ja sitä kautta laitteistotkin ovat vielä kalliita (> 10 000 €).

Depth from focus
Depth from focus on kuvaustekniikka, jossa kohteiden etäisyyttä kamerasta arvioidaan vertailemalla niiden tekstuurien tarkkuuksia eri tarkennusetäisyyksillä. Tekniikka ei ole kovin tarkka, ja kuvaustilanteessa kohteen pitää olla liikkumatta. Moniin kohteisiin tarkkuus on kuitenkin ihan riittävä. Toisaalta taas kuvaamiseen tarvitaan vain yksi kamera sekä moottoritarkennuksella toimiva linssi. Moottoritarkennuksen sijaan voidaan myös kameraa liikuttaa kohtisuoraan kohdetta kohti (tai poispäin). Tämä tekniikka ei sovellu käytettäväksi mikäli kohteessa ei ole tekstuuria, josta näkisi onko kohde tarkka vai ei.
