Tarkoituksena oli kehittää raudoitusverkkojen leikkaussolun poimintarobotin konenäköohjausta. Vanhan toimimattoman konenäköjärjestelmän tilalle oli tarkoitus kehittää uusi järjestelmä hyödyntäen kuitenkin olemassa olevaa mekaniikkaa ja laitteistoa sovelletusti. Tavoitteeksi asetettiin nopeampi sekä monipuolisempi toiminta kuin aikaisemmalla järjestelmällä.

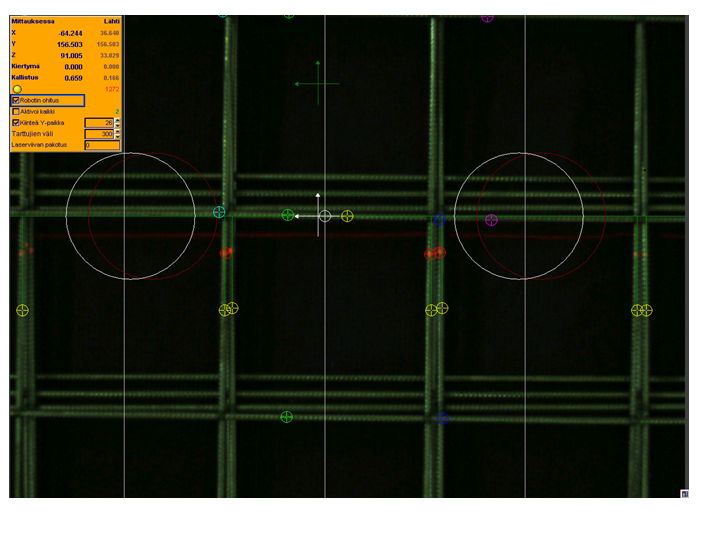
Verkkojen poiminnasta vastaa yleisrobotti, joka tarvitsee uuden tarkemman määrittelyn mukaan seuraavat tiedot poimintapisteestä: x-, y- ja z-koordinaatit sekä verkon kiertymä ja kallistuma. Verkon poimintapisteen tulee olla verkon reunimmaisessa poikkiraudassa, mutta ei risteävien rautojen hitsauskohdissa. risteyskohdat tulee siis tunnistaa, jotta ne voidaan huomioida poimintapistettä määrittäessä.

Lopullisessa, tehtaalle asennetussa järjestelmässä käytettiin hyväksi alkuperäistä älykameraa, korotettua kamera-valaisintelinettä sekä kuutta viivalaseria. Päällimmäisen verkon paikan ja asennon määritys tapahtuu laserviivojen verkkoihin muodostamien valopisteiden aseman perusteella. Kaikki kuvaan perustuva laskenta tapahtuu kamerassa ja kamera lähettää tulokset suoraan robotille. Robotti saa seuraavan poimittavan verkon paikkatiedot aina jo edellisen verkon leikkauksen aikana. Robotti on siis koko ajan toiminnassa, eikä seuraavaa poimittavan verkon paikkaa tarvitse odottaa.