SAMKin TKI-laboratorioon tuotiin puolentoista tonnin painoinen tärymalja, jota oli käytetty naulojen lajitteluun niiden suoruuden mekaanista tarkastamista varten. Nyt tärymaljan yhteyteen oli tarkoitus luoda konenäköjärjestelmä, joka tarkastelee naulojen suoruutta ja sinkityksen onnistumista sekä tunnistaa ylimääräisen kuonan nauloissa. Innovointivaiheessa tuli erilaisia ideoita aina pienestä 3D-tulostetusta hyppyristä käännöksen tekevään 3D-tulosteeseen.
Ensimmäisen testatun hyppyrin ideana oli, että naulat pyörisivät oletettavasti ilmassa ainakin kerran akselinsa ympäri, jolloin konenäkökamera pystyisi kuvaamaan naulan kokonaisuudessaan. Hyppyriä testattiin useampaan kertaan ja sen todettiin olevan varteenotettava vaihtoehto. Tämän jälkeen tärymaljaan lisättiin kieroja nauloja, jolloin naulojen hypytys ei enää toiminut, sillä kiero naula tukki hyppyrin.

Ongelmista johtuen hyppyrin käyttö päätettiin unohtaa ja suunnitella uudentyyppinen järjestelmä. Näin syntyi käännöksen tekevä 3D-tuloste, “spiraalikääntäjä”
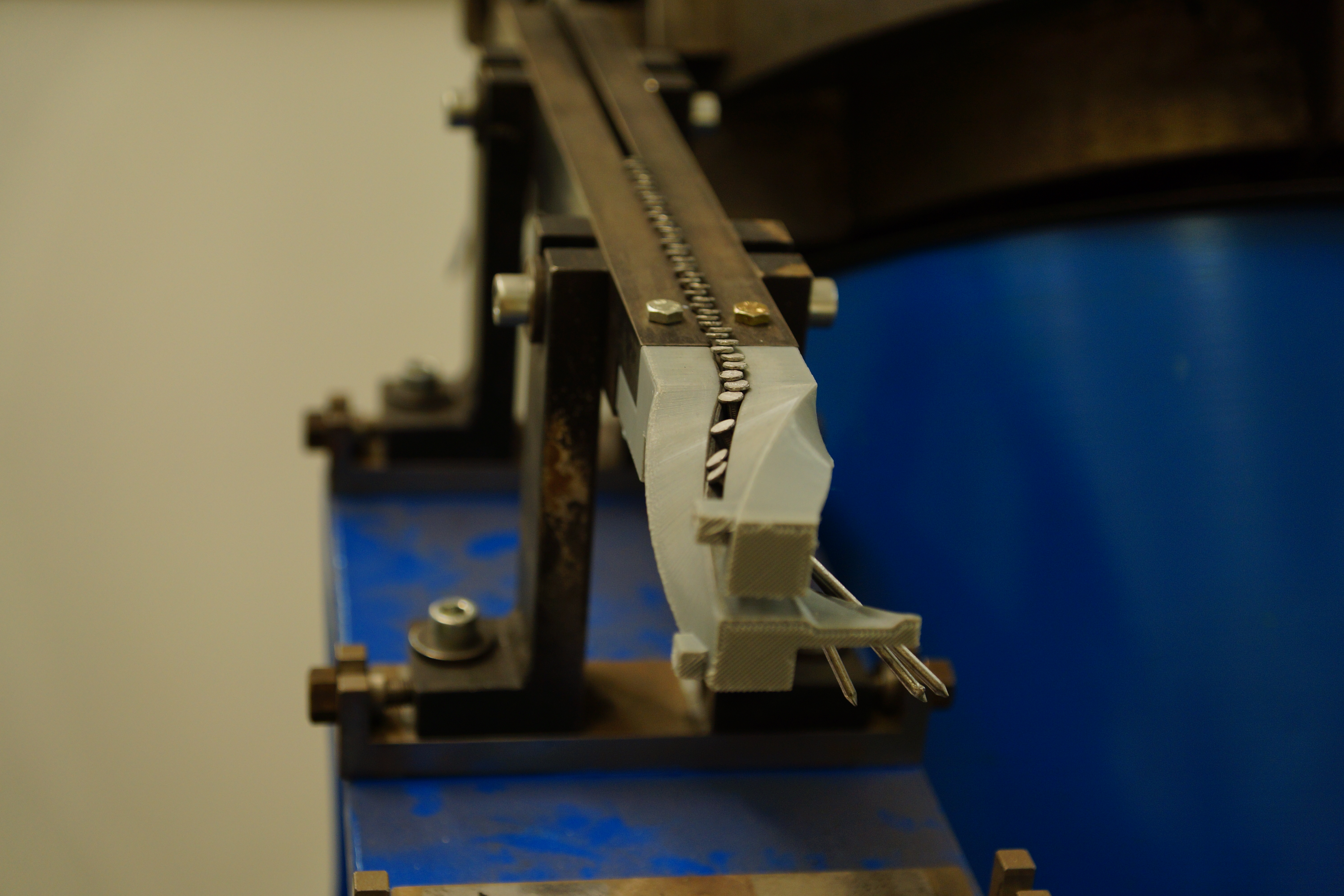
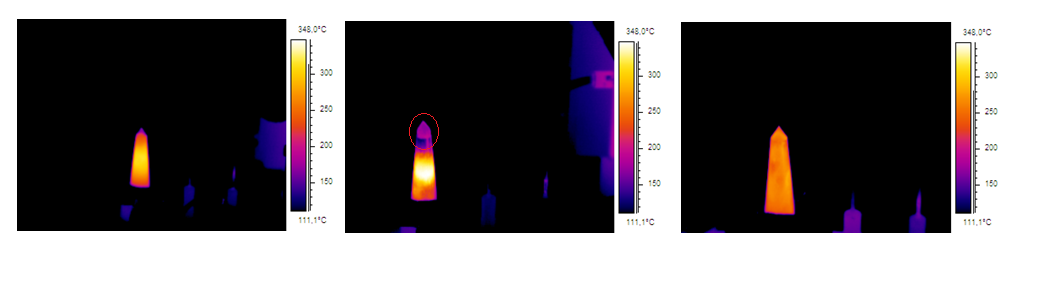
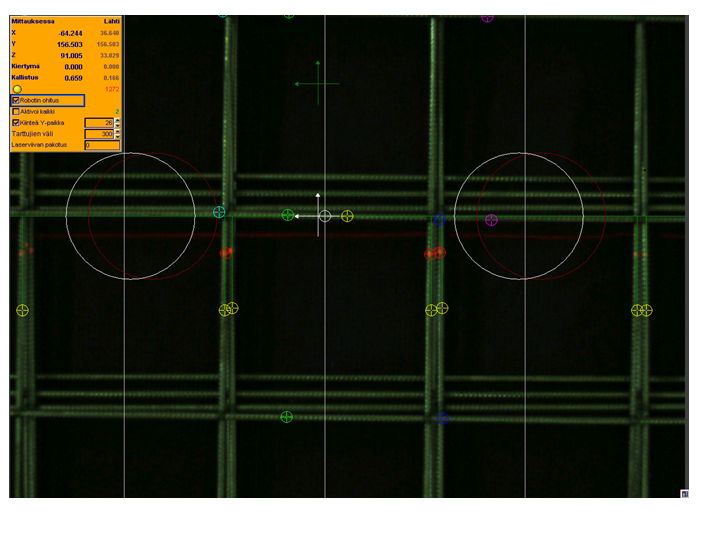
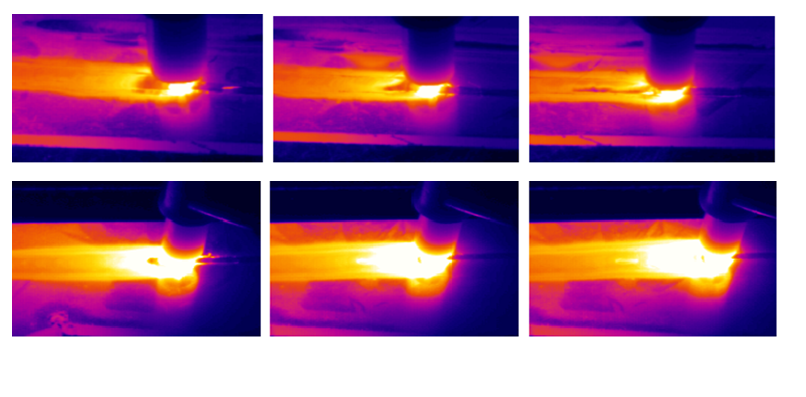
Käännöksen jälkeen järjestelmä tarvitsi tason, jonka päällä naulojen tarkastus tapahtuu. Suoraan kääntäjän perään liitettiin mattamustaksi maalattu kalteva taso, jolle naulat voivat vieriä käännöksen jälkeen. Näin voidaan varmistua siitä, että naulat pyörähtävät vähintään yhden kerran akselinsa ympäri. Kamera sijoitettiin kuvaamaan nauloja kaltevalla tasolla diffuusikupolivalaisimen läpi. Tarpeeksi nopealla kameralla (120 fps, VGA-resoluutio) saatiin n. 10-15 kuvaa/naula. Tällä nopeudella onnistuu jokaisen naulan tarkastus useasta suunnasta. Jos naula on vino, se ei lähde kaltevalla tasolla pyörivään liikkeeseen, mutta vinous näkyy hyvin yhdessäkin asennossa, jolloin naula poistetaan. Oheisesta videosta näkyy järjestelmän toimintaperiaate.