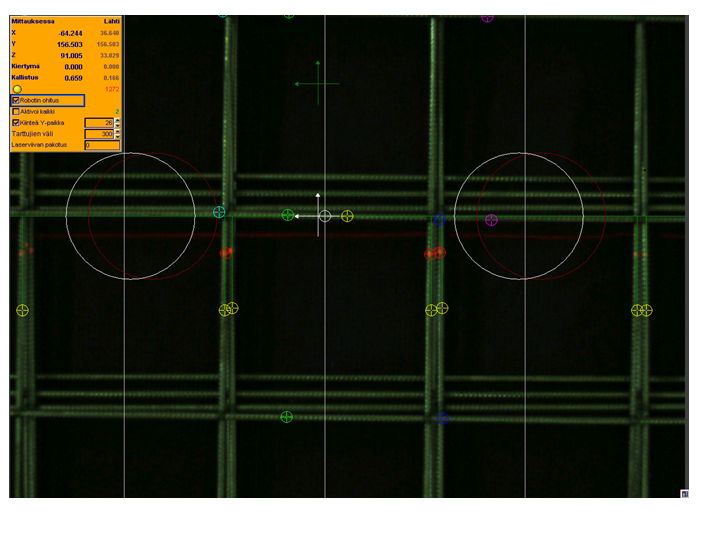
Tarkoituksena oli kehittää raudoitusverkkojen leikkaussolun poimintarobotin konenäköohjausta. Vanhan toimimattoman konenäköjärjestelmän tilalle oli tarkoitus kehittää uusi järjestelmä hyödyntäen kuitenkin olemassa olevaa mekaniikkaa ja laitteistoa sovelletusti. Tavoitteeksi asetettiin nopeampi sekä monipuolisempi toiminta kuin aikaisemmalla järjestelmällä. Verkkojen poiminnasta vastaa yleisrobotti, […]
Kuukausiarkistot: kesäkuu 2014
2 artikkelia

Tutkimuksessa tavoitteena oli tutkia konenäön käyttömahdollisuutta puuviilujen laadun luokittelussa. Toiveena oli tunnistaa mahdollisimman paljon erilaisia virheitä viilussa yhdellä järjestelmällä. Tutkimus toteutettiin kuvaamalla viilut: Lähi-infrapunaspektraalikameralla, älykameralla (5Mpix), lähi-infrapunakameralla ja viivakameralla. Suurimpana haasteena kuvauksissa oli viilujen suuri leveys,joka oli jopa 2m:ä. Kuvissa esimerkkejä viilujen virheistä. Lähi-infrapunaspektraalikuvauksella haetaan aineiden välisiä eroavaisuuksia. Viiluissa virheet […]